




Activities

1.個人簡介
范俊峰,中國科學(xué)院自動化研究所副研究員,2014年本科畢業(yè)于北京理工大學(xué),2019年博士畢業(yè)于中國科學(xué)院自動化研究所。入選中國科協(xié)青年人才托舉工程、中科院青促會和中科院首批特別研究助理人才計劃。現(xiàn)擔(dān)任中國自動化學(xué)會青年工作委員會委員、中國人工智能學(xué)會智能服務(wù)專委會委員、中國指揮與控制學(xué)會無人系統(tǒng)專委會委員等。主要研究方向為水下機器人、機器人視覺測量與控制,發(fā)表學(xué)術(shù)論文 40 余篇,其中以第一作者或通信作者發(fā)表 SCI 期刊論文 11篇(IEEE 匯刊 7篇),獲授權(quán)國家發(fā)明專利 20余項。作為項目負(fù)責(zé)人主持國家自然科學(xué)青年基金、北京市自然科學(xué)基金面上項目、中科院青年創(chuàng)新促進(jìn)會、中科院特別研究助理人才項目、軍科委預(yù)研基金項目、商飛創(chuàng)新基金項目等7項,作為核心人員參與軍科委重點項目、國家自然科學(xué)基金重點項目等4項。
2.科研經(jīng)歷
主要從事智能機器人方面的研究,圍繞智能焊接機器人和水下仿生機器人開展了系統(tǒng)深入的研究。在智能焊接機器人研究方面,提出了結(jié)構(gòu)光視覺傳感器的設(shè)計與標(biāo)定、微細(xì)焊縫初始點導(dǎo)引與跟蹤、基于高效卷積算子的焊縫特征點準(zhǔn)確提取、基于編碼結(jié)構(gòu)光的焊接機器人三維路徑規(guī)劃、復(fù)雜空間曲線焊縫實時跟蹤與姿態(tài)優(yōu)化等方法,并研發(fā)了具有自主知識產(chǎn)權(quán)的焊縫識別與跟蹤系統(tǒng),在機器人焊接生產(chǎn)線上得到批量應(yīng)用,服務(wù)制造強國的戰(zhàn)略需求。在水下仿生機器人方面,提出了高機動長航時仿生推進(jìn)系統(tǒng)優(yōu)化設(shè)計、水下環(huán)境三維感知及智能避障等方法,并作為核心人員研發(fā)了仿生滑翔機器海豚,完成長航時海洋環(huán)境觀測任務(wù),服務(wù)海洋強國的戰(zhàn)略需求。
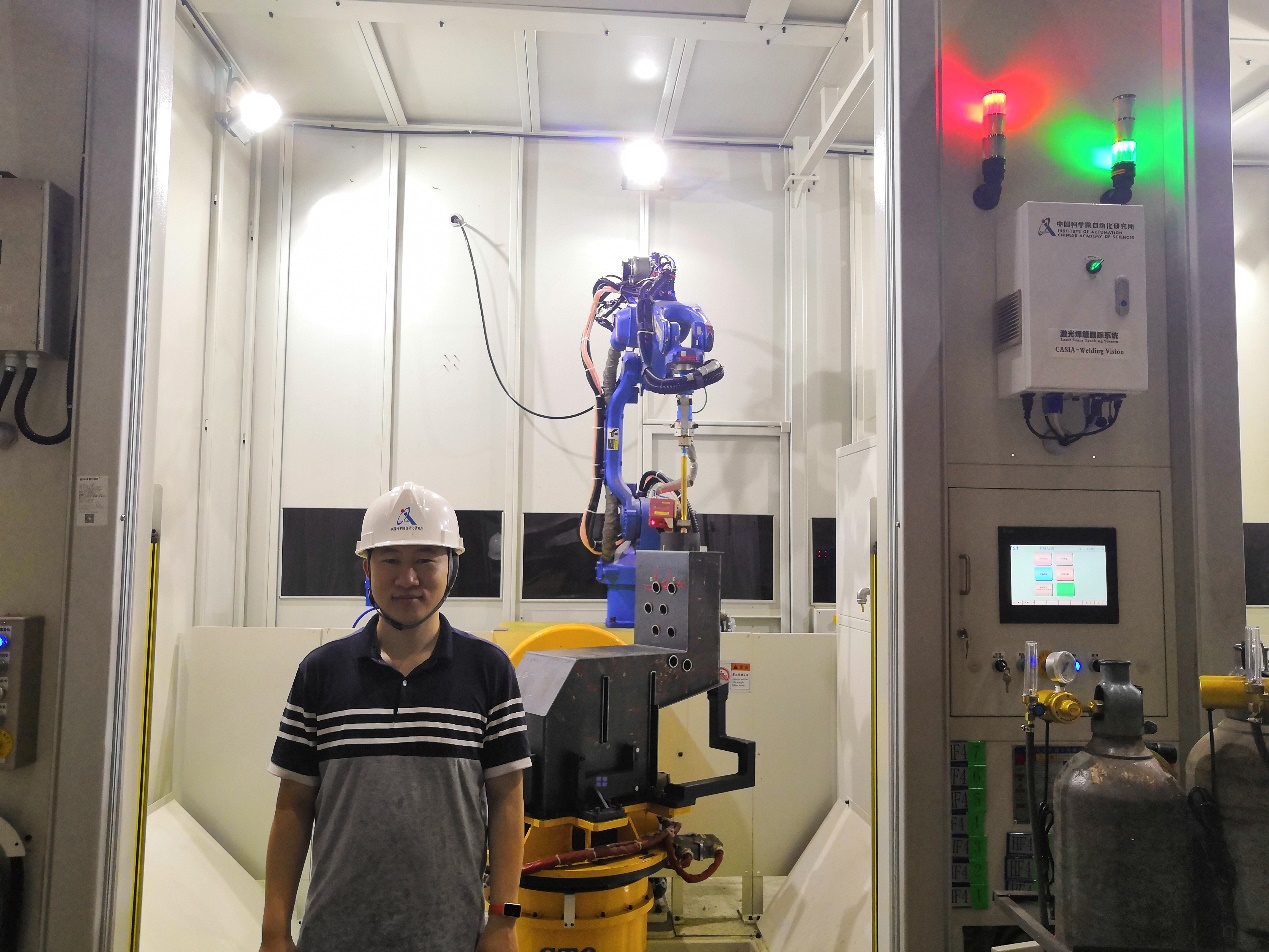
圖1 機器人智能焊接生產(chǎn)線現(xiàn)場照片

圖2 海上試驗照片
3.基于青年人才托舉工程項目的收獲
感謝中國自動化學(xué)會,我有幸入選第七屆中國科協(xié)青年人才托舉工程(2021-2023),青托項目執(zhí)行期間,在中國自動化學(xué)會、各級領(lǐng)導(dǎo)和托舉導(dǎo)師團(tuán)隊的指導(dǎo)與關(guān)心下,我取得了明顯的成長和進(jìn)步,入選了中科院青促會人才計劃和中科院特聘研究骨干,主持了北京市自然科學(xué)基金面上項目1項、商飛創(chuàng)新基金項目1項,以第一作者或通信作者發(fā)表IEEE 匯刊 5篇,并開發(fā)出具有完全自主知識產(chǎn)權(quán)的水下精細(xì)化三維感知儀器,持續(xù)擴大了在本領(lǐng)域的學(xué)術(shù)影響力。
4.自動化學(xué)會給予的支持和幫助
在我個人成長進(jìn)步的過程中,特別感謝中國自動化學(xué)會提供的學(xué)術(shù)交流平臺。2022年中國自動化大會上青年論壇的報告,擴大了學(xué)術(shù)影響力;2021年中國自動化大會上,聆聽專家學(xué)者的學(xué)術(shù)報告,開闊自己的視野,受益匪淺;中國自動化學(xué)會組織的中國科協(xié)“科創(chuàng)中國”活動,給我的科研成果提供了一個展示的平臺,促進(jìn)了科技成果的轉(zhuǎn)化。此外,我現(xiàn)為中國自動化學(xué)會高級會員,中國自動化學(xué)會青年工作委員會委員,有機會與一批優(yōu)秀的學(xué)者交流,不僅增加了自己的見識,還認(rèn)識了志同道合的朋友,促進(jìn)了合作研究。



5.一句話座右銘/人生信條
艱難困苦玉汝于成,篳路藍(lán)縷砥礪前行。
